從安霸Alberto Broggi的貢獻看計算機視覺技術如何驅動自動駕駛發展

隨著人工智能技術的飛速進步,自動駕駛已成為全球科技與汽車產業競逐的焦點。在這一領域,計算機視覺技術作為感知環境的“眼睛”,扮演著至關重要的角色。而談到計算機視覺在自動駕駛中的先驅應用,意大利帕爾馬大學的Alberto Broggi教授及其團隊的工作不容忽視。他們的研究成果,不僅為后續技術發展奠定了基石,也深刻揭示了計算機視覺技術如何成為自動駕駛系統的核心驅動力。
計算機視覺技術是使機器能夠“看懂”并理解圖像或視頻內容的技術集合。在自動駕駛系統中,它主要負責從車載攝像頭捕獲的原始像素數據中提取有意義的信息,從而實現對周圍環境的實時感知與理解。具體而言,應用于自動駕駛的關鍵計算機視覺技術主要包括:
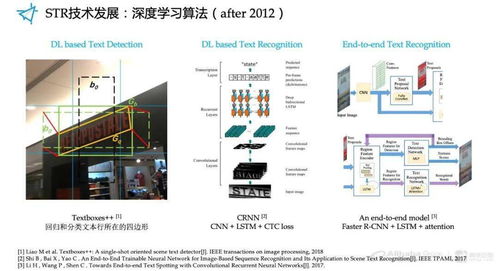
- 目標檢測與識別:這是最基礎也是最重要的任務。通過深度學習模型(如YOLO、SSD、Faster R-CNN等),系統能夠實時檢測并識別出圖像中的各類物體,如車輛、行人、騎行者、交通標志、車道線、信號燈等。例如,Alberto Broggi團隊在早期研究中就致力于開發能夠識別道路和障礙物的視覺算法。
- 語義分割:與目標檢測框出物體不同,語義分割旨在對圖像中的每一個像素進行分類,從而精確勾勒出不同物體和道路元素的輪廓。這對于理解可行駛區域、區分路面與人行道、識別精確的物體邊界至關重要。
- 立體視覺與深度估計:使用兩個或多個攝像頭(模擬人眼雙目視覺),通過計算視差來估計場景中物體的距離(深度信息)。這項技術為自動駕駛系統提供了關鍵的三維空間感知能力,是早期視覺主導的自動駕駛研究(如Broggi教授的ARGO項目)的核心。
- 視覺里程計與SLAM:僅通過攝像頭序列圖像,估計車輛自身的運動軌跡并同時構建周圍環境的地圖。這對于在沒有高精度GPS信號的區域實現定位導航非常重要。
- 多傳感器融合:雖然計算機視覺是核心,但在實際應用中,它常與激光雷達(LiDAR)、毫米波雷達等傳感器數據融合,以彌補純視覺在惡劣天氣、光照不足等情況下的局限性,提供更魯棒、更全面的環境模型。
回顧歷史,Alberto Broggi教授是這一領域的先驅之一。早在20世紀90年代末,他領導的團隊開發的ARGO實驗車,就主要依靠立體視覺系統實現了長距離的自動駕駛演示。這項名為“MilleMiglia in Automatico”的實驗,從帕爾馬到拉斯佩齊亞往返近2000公里,其中94%的路程由視覺系統自主控制完成,在當時引起了巨大轟動。這一成就雄辯地證明了,即使在沒有當今強大深度學習工具的時代,精心設計的計算機視覺算法已能支撐復雜的自動駕駛任務。
計算機技術的持續開發,特別是硬件算力的指數級增長和深度學習算法的革命,為計算機視覺在自動駕駛中的應用注入了前所未有的動力。硬件層面,從早期的通用CPU,到后來的GPU并行計算,再到如今專為視覺處理和AI推理設計的ASIC芯片(如安霸半導體Ambarella等公司提供的解決方案),計算效率和處理速度得到了質的飛躍,使得在車載嵌入式平臺上實時運行復雜的神經網絡成為可能。軟件與算法層面,卷積神經網絡(CNN)的興起徹底改變了計算機視覺的性能上限。大規模標注數據集(如ImageNet, KITTI, Cityscapes)用于模型訓練,使得系統的檢測與識別精度、魯棒性遠超傳統手工設計特征的方法。
從Alberto Broggi等研究者的開創性工作到今天,計算機視覺技術通過目標檢測、語義分割、深度感知等一系列關鍵技術,構成了自動駕駛感知層的中樞。而計算機硬件與軟件算法的協同開發,則為其提供了堅實的性能基石。隨著端到端學習、神經輻射場(NeRF)等新技術的引入,計算機視覺必將繼續深化其在自動駕駛系統中的核心作用,推動全無人駕駛的最終實現。
如若轉載,請注明出處:http://www.itopen.cn/product/25.html
更新時間:2026-04-14 14:59:51